实验一、认识实验
一、实验目的
1、初步了解EFPLC装置组成及各部分作用
2、初步学会安装和使用STEP7编程软件
3、最简单的程序输入及调试
二、实验设备
1、EFPLC可编程序控制器实验装置
2、输入输出模块
三、实验内容
1、安装STEP7编程软件
2、STEP7编程软件的应用
3、程序的编写及调试
四、上机练习
1、安装STEP7 软件。
2、熟悉编程环境,会输入最简单指令。并运行和调试。
3、学会使用S7-PLCSIM仿真软件。
实验二、基本指令的应用
一、实验目的
1、了解各种基本指令的使用
2、进一步熟悉STEP7的使用
二、实验设备
1、EFPLC可编程序控制器实验装置
2、输入输出模块
三、实验内容
1、位逻辑指令
2、定时器与计数器指令
3、数据处理类指令
4、数学运算类指令
5、逻辑控制类指令
6、程序控制类指令
四、上机练习
练习教材上各种基本指令及习题
实验三、五星彩灯实验
一、实验目的
编制PLC程序,组成不同的灯光闪烁状态。
二、实验设备
1、EFPLC可编程序控制器实验装置
2、五星彩灯及八段码显示实验板EFPLC0101
3、连接导线若干
三、实验内容
1、控制要求:10个红色发光二极管,L1-L10的亮、
暗组合须有一定的规律。隔1秒钟,变化一次,周而
复始循环。
2、 I/O(输入、输出)地址分配
五星彩灯板上J3接EFPLC实验装置上的J2。
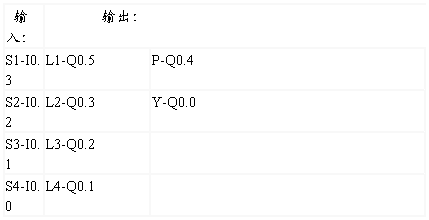
输出点定义:

3、按照要求编写程序
4、运行
启动程序,仔细观察L1~L10亮暗组合次序是否符合设计要求。若不符合,反复调试;符合则可停止程序。
实验四、八段数码管显示实验
一、实验目的
用PLC完成八段数码管显示
二、实验设备
1、EFPLC可编程序控制器实验装置。
2、电机控制实验板EFPLC0101 。
3、连接导线若干。
三、实验内容
1、控制要求:将八段数码正确显示,并从0-9连续自
动变化。
2、I/O(输入、输出)地址分配

3、按照要求编写程序
4、运行
启动程序,反复调试。符合要求后,停止程序运行。
四、编程练习
配合EFPLC0100实验板,完成一个多组抢答器(四组以上)。
控制要求:在复位后,任一组抢先按下按钮后,数码管应立即显示那一组的组号数字。后按的任何组的按钮不起作用(互锁、自锁)。复位后,可进行下一轮抢答。
实验五、水塔水位自动控制实验
一、实验目的
用PLC控制水塔的液位及水池的液位。
二、实验设备
1、EFPLC可编程序控制器实验装置。
2、EFPLC0103水塔水位自动控制实验板 。
3、连接导线若干。
三、实验内容
1、控制要求:按S4(表示水池低水位)→Y阀打开进水,L4灯亮1秒后暗→按S3(表示水池水已满)→Y阀关,L3灯亮→按S2(表示水塔低水位)→P泵开,L2灯亮1秒后暗(表示水位已超过低限位),L3灯暗(表示水池水位低于高限位)→按S1(表示水塔水已满)→P泵停,L1灯亮,2秒后暗.
2、I/O(输入、输出)地址分配
3、按照要求编写程序
4、 调试并运行程序
四、编程练习
当水池水位低于低水位(按S4,L4灯亮),阀Y灯亮,进水,定时器开始定时2秒后,如果L4灯仍亮,那么阀Y灯闪烁,表示Y故障,没有进水。L3灯亮后,阀Y关闭,灯暗。当L4灯暗时,水塔水位低于低水位时(按S2,L2灯亮),泵P抽水,灯亮,当水塔水位高于高水位时,泵Y停。
根据上述控制要求,编制带自诊断的水塔水位自动控制程序,并上机调试运行。
实验六、自动送料车控制实验
一、实验目的
用PLC构成系统自动送料车系统
二、实验设备
1、EFPLC可编程序控制器实验装置。
2、EFPLC0102自动送料车系统控制实验板 。
3、连接导线若干。
三、实验内容
1、控制要求:初始状态:红灯L1暗,绿灯L2亮,表示允许汽车开进装料。料斗K2,电动机M1、M2、M3为OFF。当汽车到达时(按一下S2表示),L1灯亮,L2灯暗,L5灯亮。M3转,M2在M3转动后3秒运行,M1在M2转动后3秒运行,K2在M1转动后3秒开始出料。当车装满后(按S2表示),料斗K2关闭,电动机M1延时3秒后关断,M2再延时3秒后关断,M3再延时3秒后关断。L2绿灯亮,L1红灯暗,表示汽车可以开走。过5秒后L5灯灭,表示车已开走。按S3表示料斗中的料已到低限,需要进料。K1打开进料。按S1表示料满,K1关闭。
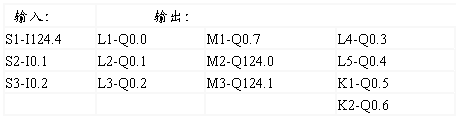
2、I/O(输入、输出)地址分配
3、按照要求编写程序
4、调试并运行程序 。
四、编程练习
根据下述的两种控制要求分别编制不带车辆计数和带车辆计数的自动送料装车系统的控制程序,并上机调试运行。
1、初始状态与上面实验相同。当料位低于下限时(按S3表示),L4灯亮,K2关(灯灭)。停止出料,进料K1开(灯亮),进料。当料位高于上限时(按S1表示),L3灯亮,K1关停止进料。料斗K2打开,继续出料,其他与上面实验相同,当M3停止后,将汽车放行。
2、控制要求同上题,增加每日装车数的统计功能。
第二篇:PLC四层电梯实验报告
黎明职业大学
课 程 设 计
题 目:基于CP1H系列的PLC
在电梯控制中的应用
作 者
学 号:
班 级:
系 别:
指导老师:
电子工程系
2010 年 6 月 泉州
目录
一、 引言-----------------------------------------------------------( 3 )
二、 电梯控制设计方案分析-----------------------------------( 3 )
三、 电梯控制硬件部分的设计--------------------------------( 5 )
四、 电梯控制软件部分的设计--------------------------------( 6 )
五、 与实际电梯系统的差距-----------------------------------(12)
六、 设计总结-----------------------------------------------------(13)
七、 致谢-----------------------------------------------------------(14)
九、 参考文献-----------------------------------------------------(14)
十、 附录A--------------------------------------------------------(15)
附录B--------------------------------------------------------(16)
附录C--------------------------------------------------------(17)
前言:电梯做为高层建筑物的重要交通工具与人们的工作与生活日益紧密联系。PLC作为新一代工业控制器,以其高可靠性和技术先进性,在电梯控制中得到广泛应用,从而使电梯由传统的继电器发展成计算机控制的一个重要方向,成为当前电梯控制和技术改造的热点之一。
自80年代后期PLC引入我国电梯行业以来,由PLC组成的电梯控制系统被许多电梯制造厂家普遍采用,并形成了一系列的定型产品。在传统继电器系统的改造工程中,PLC系统一直是主流控制系统。
一、课程设计内容
本次的课程设计主要是用欧姆龙公司生产的(CP1H型)可编程控制器来控制电梯的运行。用三相交流正反转电路来模拟曳引机带动轿厢的上行、下行,用直流电机模拟门机控制电梯的开、关门。通过编程来实现电梯的自动运行,处理外呼及内选冲突时的运行方向的确定问题,实现电梯的顺向运行,逆向截止,以满足乘客的需求。
电梯控制的控制要求:
1、能实现电梯楼层的位置的显示。
在现实生活中,电梯的轿厢内和各个门厅内都会有楼层标志来显示电梯的所在位置。
在PLC中,我们用限位开关来模拟感应器来显示楼层所在的位置。
2、轿厢内选信号与消除。
在轿厢中乘客可以通过轿厢内操控盘上的选层按钮来选定电梯运行的目的楼层,称之为内选信号。当该目的的楼层按钮按下之后,该信号则被记忆。在PLC中用线圈来表示,在满足条件后则可以清除。
3、门厅的上呼信号与下呼信号。
在门厅外的乘客可以通过外厅的上呼按钮和下呼按钮来确定是上行或下行,称之为外选信号。当按钮按下之后,则被记忆,用线圈来表示。在满足条件后就可以清除。
4、确定电梯运行方向。
根据电梯的内选及外呼信号决定电梯的运行方向及停靠点。在电梯运行中,要遵行顺向运行,逆向截止的原则安排乘客的次序,并且规定在运行方向确定之后,不响应中途的反向呼唤要求,直到到达最远目的地后在开始返程。
5、自动上行或下行运行电梯。
电梯方向确定之后,并且处与关门状态时电梯自动上行及下行。并用线圈表示,在到达目的后自动消除。
6、实现自动开关门及手动开关门
在到达楼层且满足相应条件后可自动开门,开门后定时5s后自动关门。还可以设置两个按钮可实现手动的开关门。
二、课程设计设计方案
1、确定各个I/O端口。
输入:
一层内呼:1.06 一层限位开关:0.00
二层内呼:1.07 二层限位开关:0.01
三层内呼:1.08 三层限位开关:0.02
四层内呼:1.09 四层限位开关:0.03
二层向上呼叫:0.05
二层向下呼叫:0.06
三层向上呼叫:0.07
三层向下呼叫:0.08
四层向下呼叫:0.09
开门开关:1.10 关门开关:1.11
开门限位开关:1.04 关门限位开关:1.05
输出:
一层
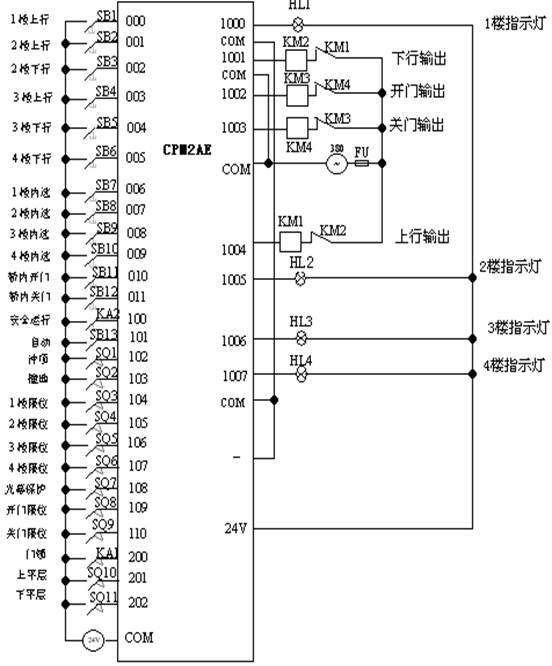
硬件接线图:
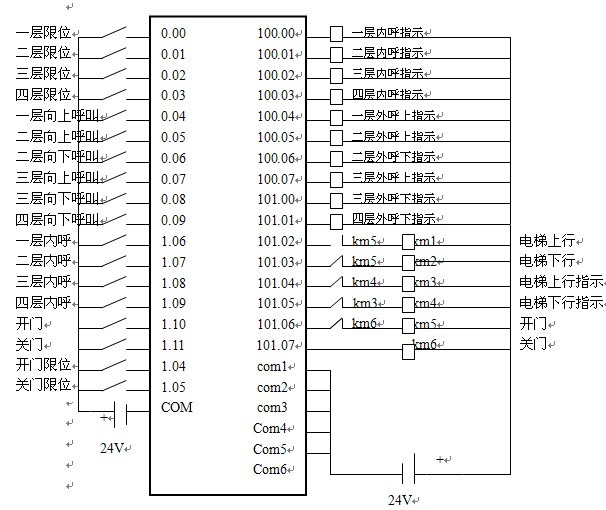
在确定出I/O端口之后 画出硬件接线图之后就是开始梯形图。
梯形图分一下几部分:
1.电梯内选信号产生与消除环节程序
当乘客上电梯了之后,可以通过轿厢内的内选信号选择要去的楼层,这里用按钮式开关来代替轿厢内操控盘上的内选按钮。当按钮按下时,内选的指示灯亮,改内选被登记。用内选信号指示灯来自锁,当到达该楼层时,信号消除。
2.电梯楼层位置的确定。
用限位开关来确定电梯的楼层显然是不够准确的,并且用来断掉内选信号也是不够精确的,如果电梯遵循顺向运行,逆向截止,而只是路过,并不是到达,会使信号消除。而不能满足乘客的需求,所以在这里。用楼层辅助继电器来确定电梯的楼层,并且导通的条件为限位开关和开门继电器。
3电梯外选信号的登记与消除。
当有乘客在厅外按下上呼或下呼按钮时,外选信号就会被登记并且保持。相应的外选信号的指示灯就会亮,当电梯与呼叫的信号同一个方向时,电梯到达那个楼层后,信号被消除。
用楼层辅助继电器来断掉该外选信号,用该外选信号指示灯来自锁。


4、电梯的定向运动。
首先要确定电梯的运行方向,才能使电梯运行。电梯的运行有两个方向,上行与下行。当电梯在接受到外呼与内选信号时,与现在的位置比较,来确定要上行还是下行。
图2-3
(四)电梯定向环节程序
电梯在自动运行的状态下,首先要先确定电梯的运行方向,也就是本环节要说的定向。电梯的定向只有两个,要么上行,要么下行。当电梯在接收到外呼、内选等信号时,应先与电梯此时所处的位置想比较,确定是要上行还是下行。一旦电梯定向后,内选与外呼对电梯进行顺向运行的要求没有满足的情况下,定向信号不能消除。例如当电梯到3楼往4楼上行时,由于此时3楼辅助继电器200.06的常闭触点是断开的,所以在此时,若 2楼上行的外呼信号被记忆,这时2楼上行辅助继电器200.01的常开触点闭合,但由于200.06的常闭触点是断开的,所以2楼定上行无法接通,该信号只能在外呼信号的产生与消除程序中被保存起来。等待电梯到达4楼后进行在次判断才能被定向。其梯形图如图2-4所示。
图2-4
(五)电梯开门与关门环节程序
本文电梯的开门主要出现在电梯自动运行停层时、电梯在关门过程中重新开门、基站开门三种。为了安全考虑,在本环节中,我们还采用了在电梯运行时禁止开门的保护电路。在电梯关门环节,当开门条件满足动作后,延时时间一到就马上关门,直到碰到关门限位触点1.10停止关门,即门已关好。其梯形图如图2-5所示。
图2-5
将以上5大部分的梯形图拼在一起,就可以得到电梯PLC控制软件部分的梯形图总图。不过为了实际一些问题的考虑,我们还在其总图中多加了一些程序进去。例如楼层的平层等一些程序进去,有助于更完善电梯PLC控制软件部分的设计。总图详见附录C。
四、与实际电梯电梯系统的差距
本文中电梯的停层、安全等问题都是假设在理想状态下运行的。由于时间、元器件限制等诸多方面的因素,本文设计的电梯控制系统与实际电梯控制系统还存在着一点的差距,其差距主要有以下几点:
(一)电梯停层减速系统
在实际的平层停车过程中,应当先是减速,再制动,以满足平层的准确性及乘客的舒适感。相应的,在电梯启动时,也应当先加速再平稳运行。由于一些因素限制,故在设计过程中,都是以整个大的框架为主,具体的减速系统只需参考电力拖动里面的电路在PLC本程序的基础上添加一些转换条件即可。本文在这就不多加说明。
(二)一些要求精准的信号元件应注意
本设计中所采用的一些限位开关,只是模拟一个信号的输入而已,在实际电梯外部硬件中是不符合实际情况的。例如本文中用到的平层开关,在实际电路中是不够准确的,应采用更加准确的(例如感应器)元件。所以在实际的电路中,应当注意。
(三)机房维修,消防运行等问题
本文只是模拟电梯大概运行的流程并未考虑电梯检修、消防运行等情况,所以在实际电路中还应加入这些要求。
五、设计总结
窗外的阳光如焰似火,炎热的夏天,那是一个毕业的季节!在这亲切而又温暖的大学校园里面,我度过了我人生最后的学生时代。在这两年来,我无论是在知识,还是在自身素质上,都有了很大的提高。有人说:实践是检验真理的条件。那么我想,实践是检验理论知识的条件吧。为了总结自己大学两年来所学的知识,锻炼提高自己。我利用这最后的一学期做了这个电梯系统。
我们这次的设计题目共有三个,电梯控制、机械手、楼与对讲。在经过考虑之后,我决定做电梯控制的。电梯在我们的日常生活中随处可见。虽然我们经常用到,但是对其内部的构造,运行方式等等我们却并不是那么了解,所以我决定做电梯控制。利用这次机会来加强我们理论知道的运用。
由于对电梯的构造不够了解,所以在确定题目之后,我也不能很准确的列出这次设计的初略方案。不过在指导老师的细心讲解下,我大体明白了电梯的运行模式,控制要求等。
为了进一步加深对电梯的了解,我开始到图书馆、互联网上查阅一些有关电梯知识的文献。经过大量查阅有关电梯的文献之后,我列出了设计题目的设计要求,并针对这些要求一个个查阅资料。
良好的开端,成功的一半。在了解这些设计要求之后,我就开始了外部电路的设计。由于材料上面的限制。所以在设计外部电路部分,我只用了较为简单的三相交流电动机正反转电路来控制电梯轿厢的上行、下行、开门跟关门。一些要求精确的元件,我们只能假设理想状态下用其他元件来代替模拟这个信号。
软件部分的编程,应该是本次设计教为重要的部分。在编程的过程中,考虑到程序庞大,所以我们采用了分块式的方法来进行编程。就是将电梯的控制分成几步控制来编写。在编程过程中,电梯运行方向判断(定向环节)较为麻烦,还好在指导老师的帮助下我们顺利完成了这部分的编程。
外部硬件与软件部分设计之中,我们在提高理论知识的同时,更加锻炼了自己的动手能力。使得我们更加清楚、明白课本上所学的理论知道与实际运用中的衔接。使得我们在论文的写作上面有了更加切身体会的文字。虽然在设计的过程中,有困难,也有疑惑。但是在解决这些问题的过程中,我们又提高了很多。这次的设计真的是对我们大学两年来所学的知识的一次总结。
致谢
在此还要感谢这设计期间,我们的指导老师曾喜鹃。在我们遇到问题或是困难时,老师们都不辞辛苦的为我们解答,给与我们技术上的帮助。此致感谢!!
参考文献
①、编著:戴一平 《可编程控制器技术及应用》 机械工业出版社
②、编著:袁任光 《程序控制器(PC)应用技术实例》 华南理工大学出版社
③、编著:方承远 《工厂电气控制技术》第2版 机械工业出版社
④、编著:张万忠 《可编程控制器入门与应用实例》 中国电力出版社
附录A
(PLC外部I/O口分配图)
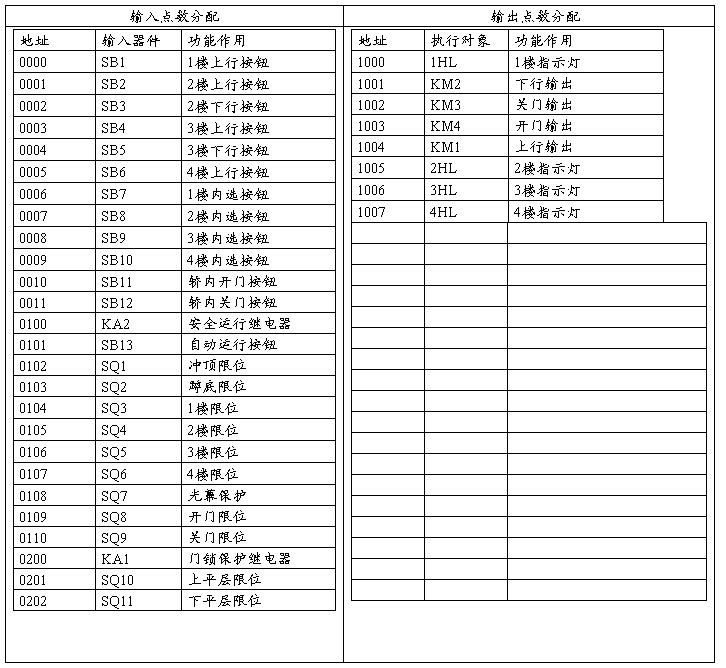
附录B
(PLC内部触点与元器件分配表)
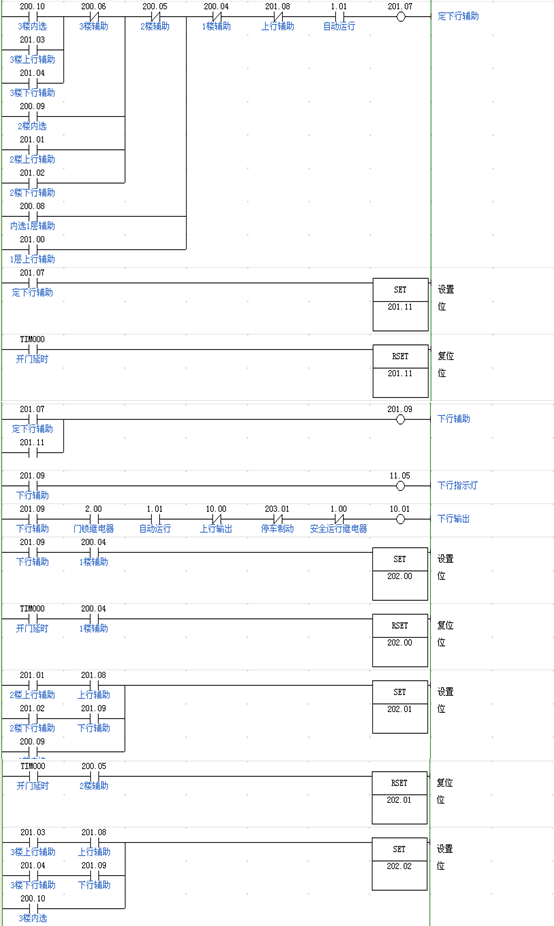
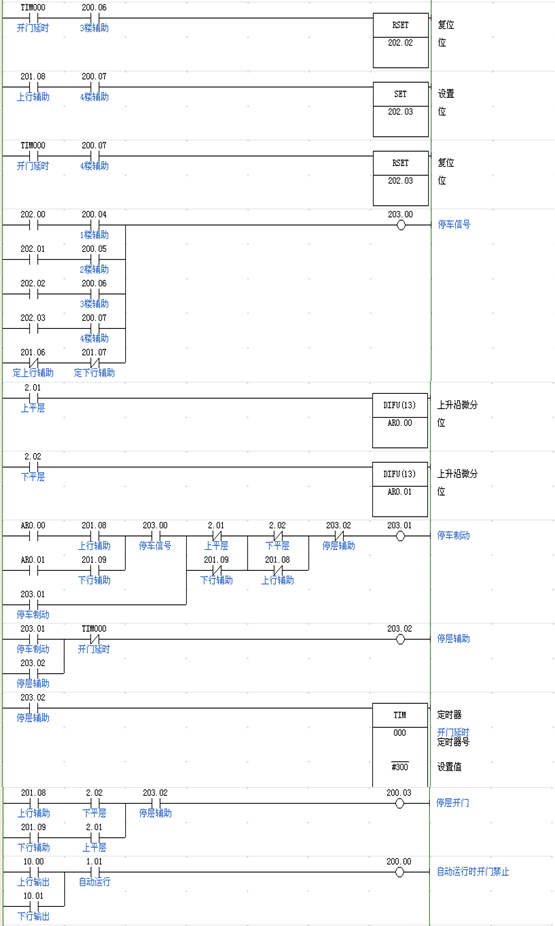
附录C
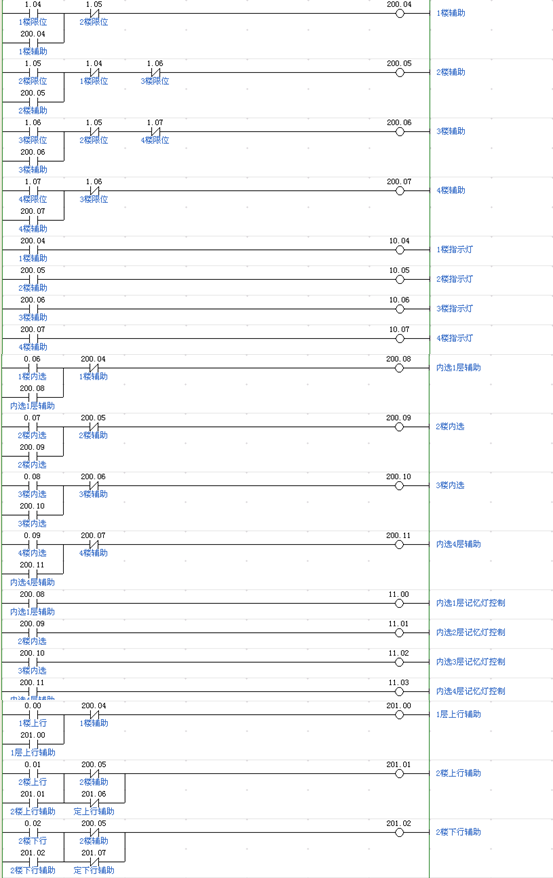 (程序梯形总图)
(程序梯形总图)